KSP w wersji podstawowej poza niedużą ilością modułów nie ma też zbytnio rozwiniętych statystyk i informacji o tym co gdzie i kiedy. W dużym skrócie latamy w kosmos wiedząc tylko tyle, że nasza aktualna szybkość to tyle-to-a-tyle metrów na sekundę… i w sumie niewiele więcej. Są zwolennicy takiego podejścia do rzeczy, głoszący wszem i wobec, że tak to się robiło w złotej erze podboju kosmosu, jednak z tym się nie zgadzamy i mówimy im stanowcze: chyba nie ![]()
VOID – Pierwszy z modów dających nam szersze pole widzenia na to, co mamy, czym latamy i jak nam ten idzie.
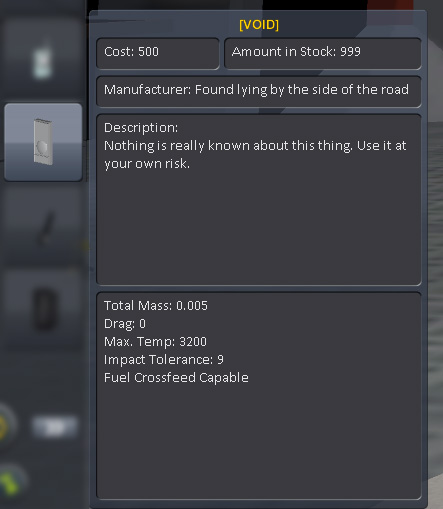
Zaczynamy od montażu modułu VOID, który znajduje się w zakładce Utility, nazwa [VOID], waga 0.005.
Najwygodniej zamontować moduł na elemencie który ma przeżyć z nami cały lot. Wtedy mamy pewność, że do końca misji wszystkie potrzebne informacje będzie można uzyskać spoglądając na statystyki.
Aby przegryźć się przez wszystkie dostępne informacje warto sprawdzić co mamy dostępne i co z tego jest nam tak naprawdę potrzebne a co może się przydać raz, góra dwa razy.
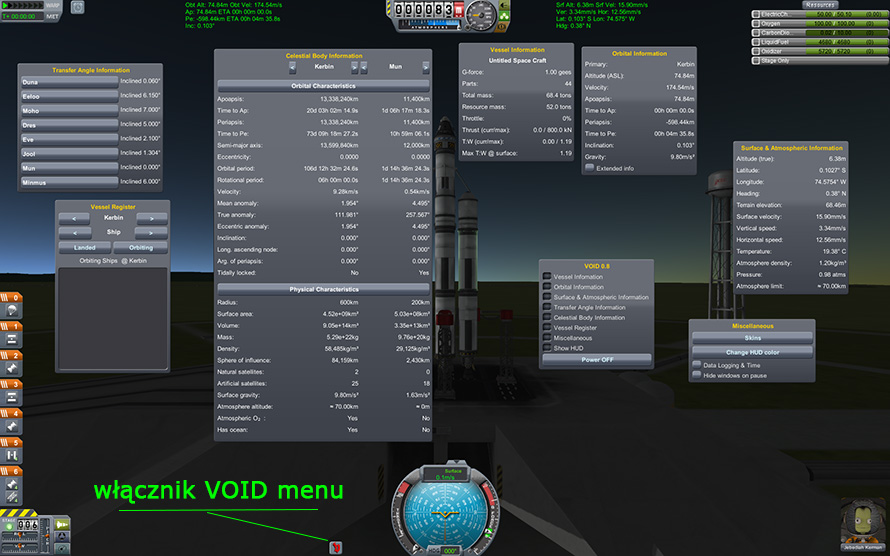
Klikając włącznik menu ( znajdujący się na dole ekrany pod stylizowaną ikoną V ) można wybrać które części VOIDa są nam aktualnie potrzebne.
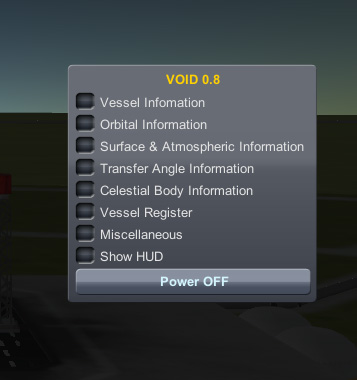
Menu: Nim włączamy i wyłączamy poszczególne moduły VOIDa. Klikając ponownie ‚V’ ukryjemy menu VOID.
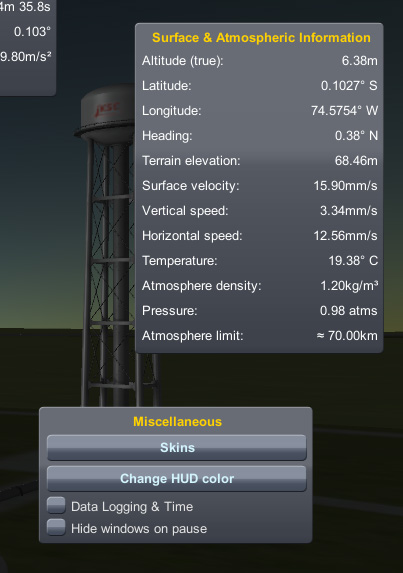
Surface & Atmospheric Info: Pełne informacje odnośnie powierzchni i atmosfery ciała niebieskiego w zasięgu którego przebywamy. Wśród informacji m.in.
- Terrain Elevation – wysokość terenu nad poziomem morza. Przydatne przy lądowaniu. Nie trzeba już oceniać wysokości terenu na podstawie długości cieni czy odbicia światła.
- Vertical speed – prędkość pionowa względem powierzchni. Jak wyżej, przydatna przy lądowaniu.
- Horizontal speed – prędkość pozioma względem powierzchni.
- Temperature – temperatura na obecnej wysokości, zmienia się wraz ze zmianą wysokości nie tylko
- Atmosphere density – gęstość atmosfery. Im wyższej tym niższa gęstość a co za tym idzie niższy opór.
- Pressure – ciśnienie.
- Atmosphere limit – uśredniona wysokość atmosfery.
Miscellaneous: Dodatkowe ustawienia VOIDa. Można włączyć logowania przebiegu misji ( dane i czas ).
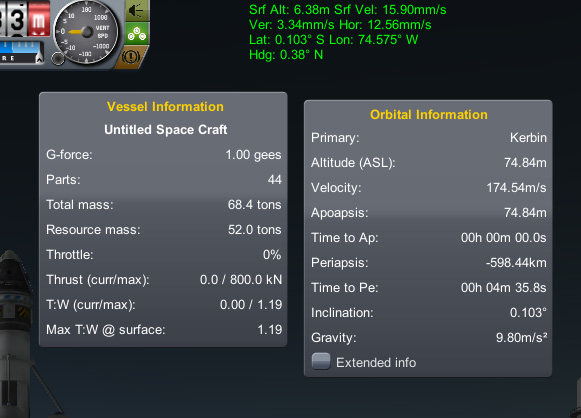
Vessel Informatio: Jedna z tych tabel którą mam włączoną zawsze.
- G-force – przeciążenie działające na nasz pojazd
- Parts – licznik elementów.
- Total mass – masa całkowita
- Resource mass – masa wszystkich zasobów jakie mamy aktualnie na pokładzie.
- Throttle – aktualne ustawienie przepustnicy
- Thrust – ciąg aktualny/maksymalny
- T:W – stosunek ciągu do masy. Jeśli jest poniżej 1 a jesteśmy w zasięgu przyciągania planety oznacza to, że nasza prędkość w stosunku do niej będzie malała. Jeśli powyżej 1 będziemy przyśpieszali.
- Max T:W @ surface – maksymalne T:W na poziomie powierzchni danego ciała niebieskiego
Orbital Information: Druga z tabel która jest dla mnie ‚must have’.
- Primary – aktualna planeta w zasięgu której jesteśmy
- Altitude – wysokość
- Velocity – prędkość względem danego ciała
- Apoapsis – aktualne apo, dzięki tej informacji orbitę można ustawić bez ciągłego przełączania się na widok mapy
- Time to Ap – czas do osiągnięcia apo
- Periapsis – aktualne peri, jw.
- Time to Pe – czas do osiągnięcia peri
- Inclination – inklinacja orbity. Już teraz nie trzeba ustawiać tego na mapie, bawić się w Sindbada żeglarza i wyliczać za pomocą kompasu. To jest kosmos, tu są komputery. Na oko to się pola orze a nie lata w kosmosie, prawda

- Gravity – siła oddziaływania grawitacji. Im wyżej tym niższa.

HUD: Właczamy go na menu VOID klikając pozycję HUD. Jeśli ktoś nie lubi tabelek może sobie włączyć tylko HUDa. Ja wolę tabelki, bo i dużo miejsca na ekranie na to pozwala. Przy mniejszych rozdzielczościach HUD może się okazać zbawieniem.
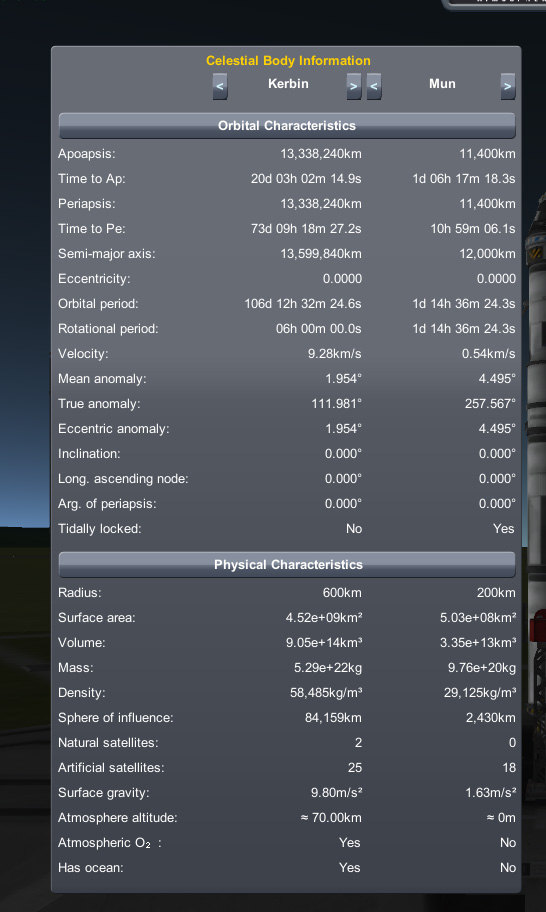
Celestial Body Information: Chcesz gdzieś lecieć ? Nie wiesz gdzie ? A może szukasz informacji o planecie, księżycu a kerbal-wiki jest zbyt zmulone ? Teraz już nie ma takiego problemu. Wszelkie informacje zawsze pod ręką. Jesteś przecież skomputeryzowanym Kerbalem.

Transfer angle information: Tabela danych transferowych na inne planety i księżyce. Podaje nam pełne informacje nt. inklinacji orbity, kąta pod jakim należy udać się w podróż i przy jakim kącie względem planety-celu. Podana jest też prędkość delta-V wymagana do osiągnięcia danego ciała niebieskiego.
Vessel register: Spis wszystkich naszych latających i umieszczonych na planetach i księżycach pojazdów.
Jak wygląda VOID w praniu u mnie ? Vessel Information jako podstawowy zestaw informacji o tym czym lecę, Orbital Information aby wiedzieć w którą stronę i czy dobrze, Surface & Atmo aby wiedzieć nad czym lecę.

MechJeb – Zuo. Przynajmniej tak postrzegają go puryści. Według nich KSP powinno być czyste i nie skażone niczym. Uznają, że kerbale latają w kosmos z wyposażeniem podobnym do używanego przez Krzysztofa Jebediaha Kerbalomba w czasie kiedy odkrywał Archipelag Kerbonazji Mniejszej. Od tamtego czasu sporo się zmieniło i loty kosmiczne wymagają czegoś więcej niż kompa, kartka papieru i ołówek. Mamy komputery.
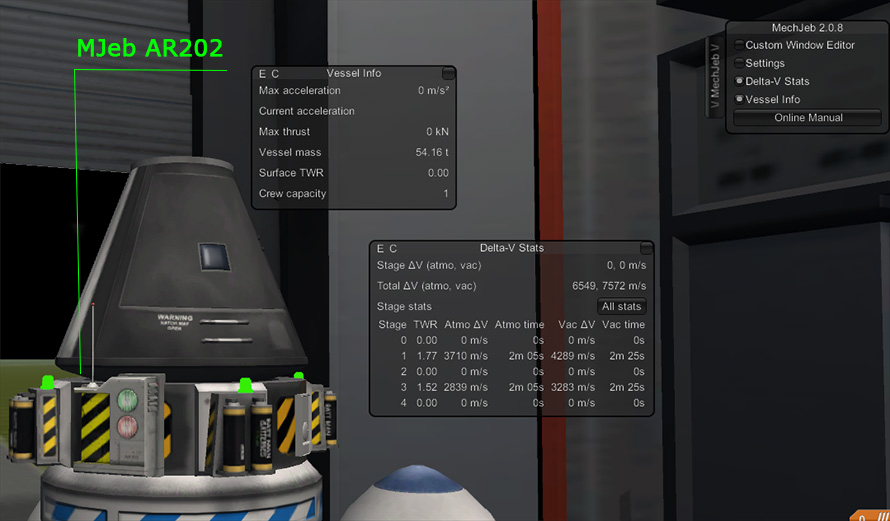
Po zainstalowaniu moda aby go użyć należy zamontować moduł MJeba. Najwygodniejszy w użyciu jest ten w obudowie AR202. Mały, poręczny i można go przypiąć dosłownie wszędzie. Już na samym początku w fazie konstruowania rakiety daje o sobie znać informując o:
Vessel Info : tutaj mamy zdublowane informacje z VOIDa. Jedną z różnic jest to, że dane te są dostępne już na poziomie projektowania i budowania. Dzięki temu wiemy jakim ciągiem będziemy dysponowali, jaką masę ma cały nasz pojazd i co ważne jaki jest stosunek T:W, czyli ciągu do masy rakiety.
Delta-V Stats: pełna informacja o delta-v tak dla całej rakiety jak i dla poszczególnych jej członów.
- Total deltaV ( atmo, vac ) – całkowite delat V w atmosferze i próżni
- Stage stats
- TWR – stosunek ciągu do masy dla poszczególnych sekcji
- Atmo deltaV – deltaV w atmosferze dla danej sekcji
- Atmo time – czas pracy w atmosferze
- Vac deltaV – deltaV w próżni
- Vac time – czas pracy w próżni
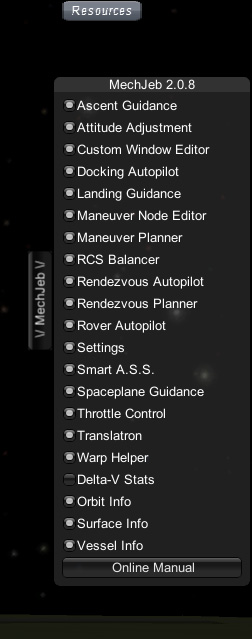
MechJeb : Menu MJeba. Wybierając poszczególne moduły MJeba można je włączać/wyłączać. Menu schowane jest po prawej stronie ekranu.
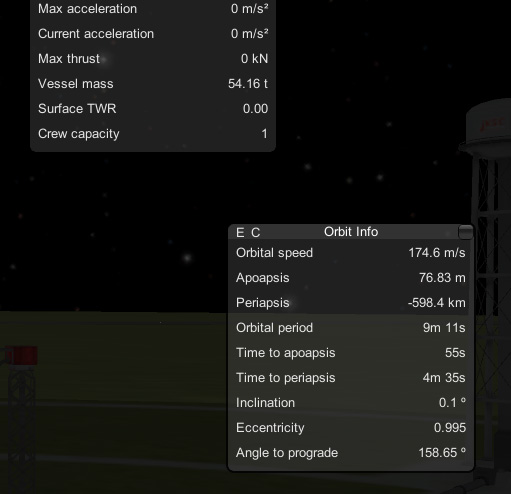
Orbit Info : Tak jak w vessel info są tutaj zdublowane informacje z VOIDa.
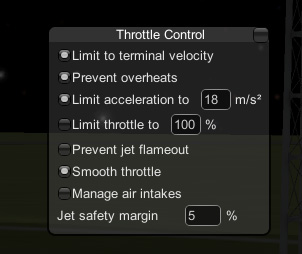
Throttle control: Kontrola ciągu. Pozwala włączyć pewne procedury które ułatwią zarządzanie ciągiem rakiety
- Limit to terminal velocity – ogranicz do prędkości granicznej. Teoria w skrócie: im szybciej się leci, tym większy opór stawia nam atmosfera. I jak się domyślamy jest pewna prędkość graniczna powyżej której nie warto na danej wysokości lecieć bo zużycie paliwa będzie nieekonomiczne. Aktywując ten przełącznik zapobiegamy nadmiernemu przyśpieszaniu i przekraczaniu prędkości granicznej. Ma to zastosowania głównie przy mniejszych konstrukcjach, bo na samym Kerbinie prędkość graniczna nie jest aż tak niska i większe jednostki nie zawsze ją osiągają. Dla przykładu:
- 75 m wys – prędkość 107 m/s
- 1000 m wys – prędkość 114 m/s
- 4000 m wys – prędkość 152 m/s
- 8000 m wys – prędkość 232 m/s
- 12500 m wys – prędkość 348 m/s
- Prevent overheats – zabezpiecza przed przegrzewaniem się jednostek napędowych. Po aktywowaniu pozwala aby silnik nabrał temperatury później regulując ciąg zapobiega całkowitemu przegrzaniu
- Limit acceleration to …. – limit maksymalnego przyśpieszenia. Użyteczna funkcja. Podczas wynoszenia większych, skomplikowanych konstrukcji zbyt duże przyśpieszenia naraża całość na znaczne naprężenia a co za tym idzie dużą szansę na uszkodzenie samej konstrukcji. Ograniczenie maksymalnego przyśpieszenia do konkretnej wartości najczęściej rozwiązuje problem. Oczywiście podobny efekt można uzyskać ręcznie zwiększając i zmniejszając ciąg.
- Smooth throttle – funkcja redukująca szarpanie jeśli korzysta się z autopilota lub np. odcina dopływ paliwa przez naciśnięcie ‚X’. Bez zaznaczenie smooth throttle naciśnięcie ‚X’ gwałtownie zeruje ciąg co często powoduje gwałtowne szarpnięcie. Aktywacja smooth throttle eliminuje ten efekt przez płynne regulowanie ciągu.
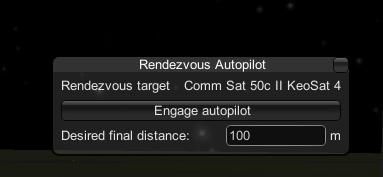
Randezvous Autopilot: Autopilot odpowiedzialny za doprowadzenie naszej rakiety do drugiego obiektu na zadaną odległość. Wszystko wygląda prosto: zaznaczamy gdzie, klikamy Engage i mamy spokój. Niestety funkcja jest daleka od doskonałości, ponieważ bardzo dziwnie dobiera orbity transferowe i potrafi sporadycznie rozbić o siebie obiekty. Są lepsze sposoby na wykorzystanie MJ do dokowania.
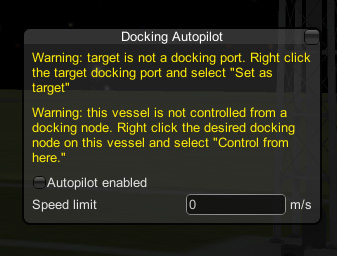
Docking Autopilot: Autopilot do dokowania. Działa dopiero po zbliżeniu poniżej 200 metrów od celu. Ważne, aby przed włączeniem DA jako cel zaznaczyć dok do którego chcemy zacumować a na swojej jednostce ustawić Control Form Here na tym doku który ma przycumować. Dzięki temu kompletny laik zacumuje dowolne pojazdy na orbicie. Wady tego rozwiązania: gigantyczne zużycie monopropelantu i raz-na-jakiś-czas efektowne kraksy.
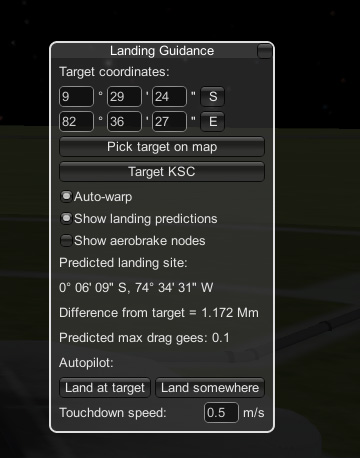
Landing Guidance: Wspomaganie lądowania. Kolejny autopilot który odwala całą robotę za nieobeznanego pilota. Na całe szczęście autopilot ten potrafi całkiem skutecznie rozbić nasz lądownik, choć całkiem dobrze wychodzą mu też lądowania w punkcie.
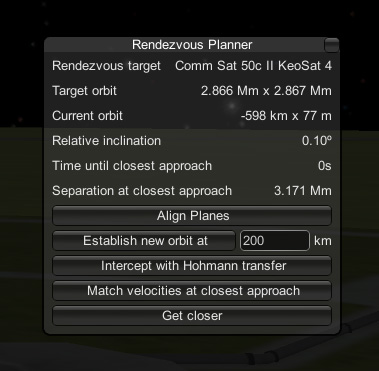
Randezvous Planner: Odpowiednich Randezvous Autopilota tyle tylko, że z pełną kontrolą nad wykonywanymi czynnościami. Aby zbliżyć dwa obiekty na orbicie postępujemy według procedury:
- Wybieramy cel do którego chcemy się zbliżyć. Musi znajdować się w strefie wpływów tej samej planety. Będzie to dowolny księżyc lub pojazd krążący na w miarę kołowej orbicie wokół planety.
- Zerujemy inklinację względem orbity naszego celu. Wystarczy kliknąć Align Planes i wykonać manewr. Wskaźnik Relative inclination zejdzie do 0.00 stopni, wartości rzędu 0.02 też są do zaakceptowania.
- Wchodzimy na orbitę transferową poniżej ( jeśli chcemy gonić cel ) lub powyżej ( jeśli chcemy czekać na cel ). Orbita powinna być orbita kołową. Można to wykonać ręcznie lub przez kliknięcie Establish new orbit at …..km.
- Ustawiamy transfer Hohmann’a. Analogicznie do powyższych klikamy na Intercept with Hohmann transfer lub ręcznie ustawiamy manewr. Wykonujemy manewr.
- Ostatnie w kolejności są manewry zrównania prędkości przy maksymalnym zbliżeniu i zbliżenie.
Plusem takiego rozwiązania w stosunku do autopilota jest to, że pilot który potrafi tylko część z manewrów może wybrać tylko te, z którymi jeszcze sobie nie radzi. Np. bezproblemowo potrafimy zrównać płaszczyzny orbit ( inklinacja względna równa lub bliska 0 ), potrafimy ustalić sobie w miarę kołową orbitę transferową ale mamy problem z wyznaczeniem Hohmanna. W takim wypadku wszystkie czynności które potrafimy wykonujemy samodzielnie poza Hohmannem którego można wykonać planerem.
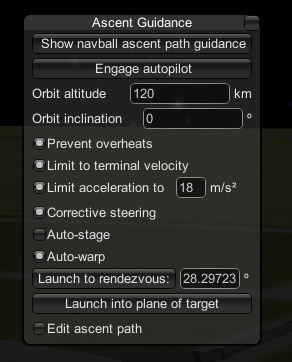
Ascent Guidance: Wspomaganie startu. Autopilot kompleksowo rozwiązujący wszelkie problemy związane ze startem. Przejmuje część funkcji z Throttle Control ( overheats, terminal velocity, limit accel. )
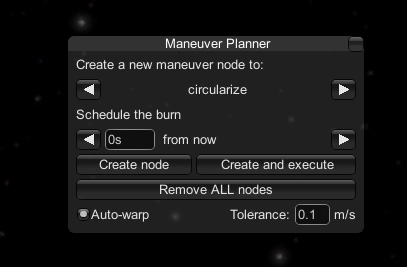
Maneuver Planner: Automat planujący konkretne manewry. Nie jest modułem ‚kliknij i już’, jest za to bardzo przydatnym ‚wspomagaczem’ myślącego pilota. W górnej belce wybieramy jaki manewr chcemy wykonać, w drugiej belce wybieramy moment kiedy ma być wykonany ( np. w Apo, Peri, na konkretnej wysokości, niezwłocznie ). Po ustawieniu klikamy Create Node – ta opcja tworzy nam manewr co można później obejrzeć na mapie i nanieść wymagane poprawki. Lub Create and execute – tworzy manewr i od razu przechodzi do jego wykonania. Po stworzeniu manewru ( node ) pojawia się jeszcze opcja Execute Node i odpowiada ona za wykonanie najbliższego manewru.
Co ważne Execute Node ma zastosowanie także przy manewrach które sami zaplanowaliśmy w tradycyjny, ręczny sposób na mapie. I to jest rozwiązanie z którego dosyć często się korzysta. Opcja Auto-Warp tłumaczy się sama, odpowiada za automatyczne przyśpieszenie czasu do momentu wykonania manewru.
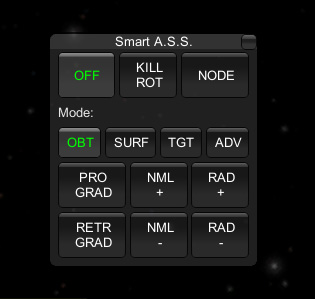
Smart A.S.S.: Zestaw podstawowych manewrów zebranych w jedno miejsce.
- OFF – wyłaczenie S.A.S.S.a
- OBT
- ProGrad – ustawia pojazd w kierunku prograde
- RetrGrad – ustawia nas na retrograde
- NML+ – ustawia w kierunku normalnej do orbity
- NML- – ustawia w kierunku antynormalnej do orbity
- Rad+ – ustawia w kierunku obiektu wokół którego krążymy
- Rad- – ustawia w kierunku od-obiektu wokół którego krążymy

- SURF pozwala nam ustawić orientację w stosunku do powierzchni ciała wokół którego krążymy. Podajemy parametry w stopniach.
- TGT odnosi się do manewrów względem aktualnie zaznaczonego celu
- KILL ROT wygasza wszelkiego rodzaju rotację i niekontrolowane obroty.
- NODE przyjmuje jako punkt odniesienia najbliższy manewr
Większość z tych manewrów można ustawić ręcznie samemu, nie jest to skomplikowane i jedyne czym się różni wersja klikana od ręcznie ustawianej to czas jaki temu poświęcimy.
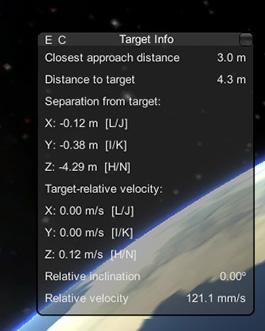
Target Info: Najważniejsza informacja z punktu widzenia pilota.
- Closest approach distance – dystans maksymalnego zbliżenia
- Distance to target – odległość od celu
- Separation from target X/Y/Z – odległość od celu po każdej ze współrzędnych wraz z informacją które klawisze odpowiadają za sterowanie thrósterami dla wybranej współrzędnej
- Target-relative velocity – prędkość względem celu wzdłuż składowych X/Y/Z.
- Relative inclination – inklinacja względem celu
- Relative velocity – prędkość względem celu
Target Info to doskonałe narzędzie do dokowania. Po zbliżeniu się do celu zaznaczamy dok który nas interesuje. Kierując się wskazaniami Separation from target ustawiamy się tak, aby odległość od celu po składowej X i Y wynosiła 0 lub była jego bliska. Odległość wzdłuż składowej Z powinna wynosić między 10 m a 80 m. Następnie korzystając z thrusterów ( RCS ) zbliżamy się do celu wykorzystując ciąg tylko wzdłuż Z ( klawisze H/N ). W razie potrzeby można nanosić drobne poprawki wzdłuż pozostałych składowych. Prędkość wzdłuż X/Y powinna być równa 0 lub bliska zero ( staram się nie przekraczać 0.2 m/s przy korektach ). Prędkość wzdłuż składowej Z może wynieść do 1.5 m/s lub więcej, jednak im bliżej tym mniejszą wartość powinna mieć. Prędkość samego dokowania powinna oscylować w okolicy 0.1 m/s lub mniej.
Opis ten pomija kilka mniej potrzebnych modułów, te mnie ważne ( wg mnie ) opisałem skrótowo.

Przykład MJeba w akcji. Przykładowa rakieta z załączonym systemem wspomagania startu i Vessel Info. Dla zobrazowania działania systemu autothrotllingu ustawiono dosyć niską jak na tak lekki pojazd wartość 18 m/s^2. Zielony kolor oznacza, że osiągnięta została wartość 18 m/s^2 i limit jest aktywny. Widać to po Vessel Info, gdzie maksymalne przyśpieszenie to 18.39 m/s^2 jest większa niż obecne przyśpieszenie.
Protractor – Komputer transferowy. Najprostszy z możliwych komputerów do samodzielnego ustawiania manewrów. Podobne funkcje są w VOIDzie, jednak Protractor jest jeszcze prostszy. Nie ma statystyk, nie ma prędkości, wysokości i całej masy informacji. Ma za to kąty orbitalne wszystkich ciał niebieskich w KSP. Dzięki temu w ciągu chwili poda nam kiedy, w którą stronę i z jaką prędkością trzeba przyspieszyć aby wskoczyć na trajektorię transferową
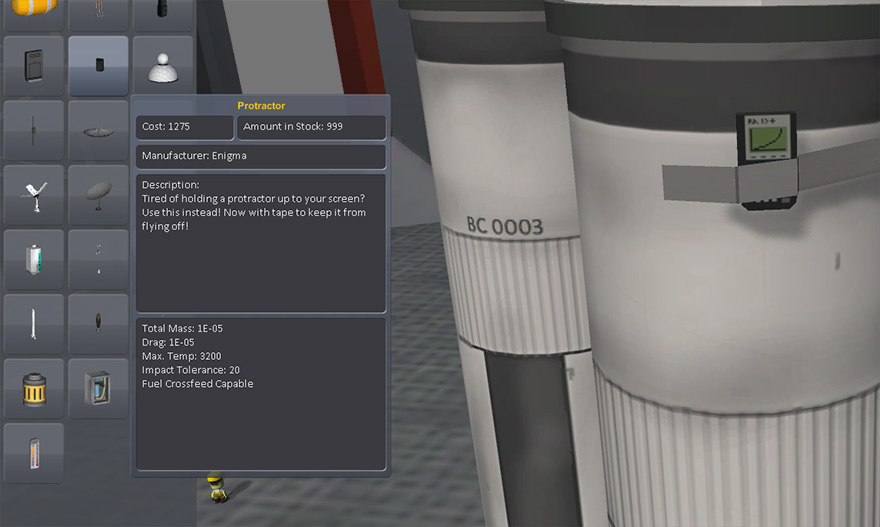
Moduł montujemy na dowolnym elemencie rakiety. Jest na tyle mały, że nie będzie przeszkadzał niezależnie od miejsca w którym się znajdzie.
Po umieszczeniu modułu pojawia się na samym dole ikonka kalkulatora. Odpowiada na włączanie i wyłączanie modułu Protractora.
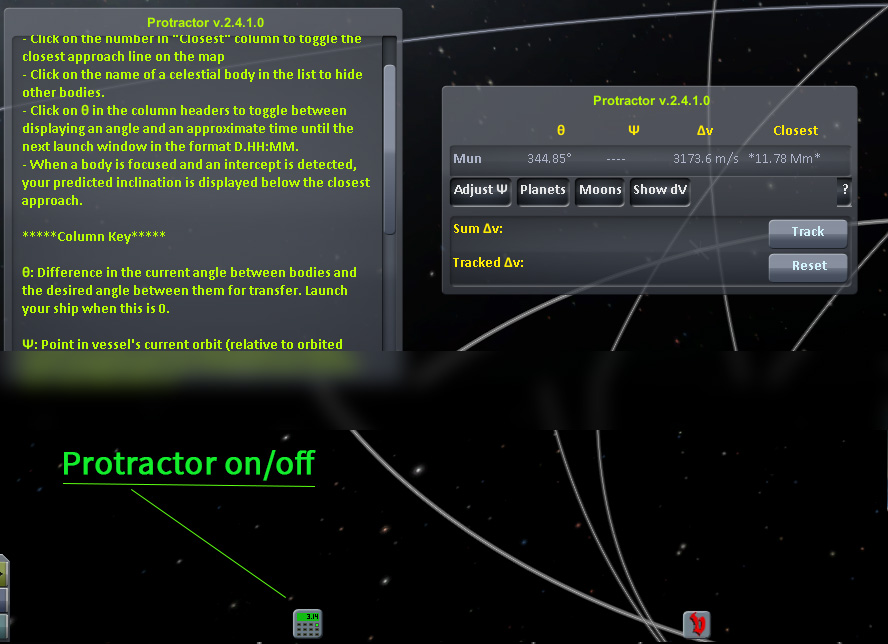
Po aktywacji Protractora w głównym oknie mamy:
- w pierwszej kolumnie wypisane wszystkie ciała niebieskie. Po kliknięciu na wybranym z nich reszta zostanie ukryta.
- w drugiej kolumnie pokazany jest kąt lub czas ( zamiennie ) pozostały do wystrzelenia na orbitę naszej rakiety. Aby bez zbędnego oczekiwania na orbicie parkingowej polecieć w stronę danej planety/księżyca należy wystartować dopiero kiedy licznik kąta/czasu osiągnie 0.
- kolumna trzecia pokazuje kąt lub czas za ile należy uruchomić silnik i przyśpieszyć do osiągnięcia pożądanej trajektorii
- kolejna, czwarta kolumna, informuje o delta-V wymaganej do osiągnięcia trajektorii przechwycenia.
Protractor jest jest bardzo małym, ale bardzo użytecznym narzędziem. Nawet przeciwnicy wszelkich modów mogą się skusić do używania go, bo informacje jakie nam serwuje dostępne są na wielu stronach lub kalkulatorach trajektorii do KSP.
Dodaj komentarz